
You've got your ST4.3. You've gathered up 2 motors from Tilta and potentially a hand controller. This article will walk you through the setup of your first 6 axis shot.
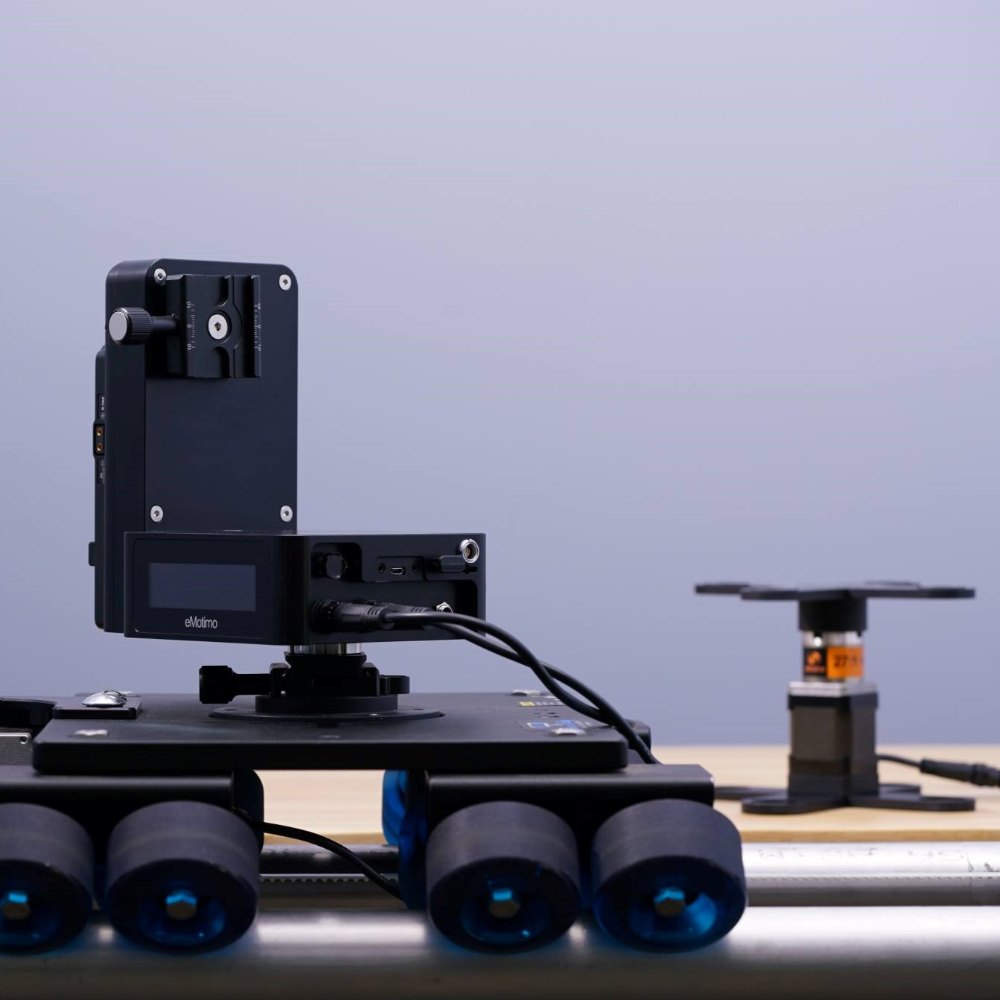
Begin by attaching your ST4.3 to your slider/dolly.
We have thorough documentation here: eMotimo Spectrum ST4-104 Camera Mounting
If you've rigged up an ST4, this process remains unchanged. Plugin the slider/dolly motor cable/extension into the M3 port on the ST4.3.

Next, Let's set up your Turntable.
Make sure you have the appropriate length eMotimo motor extension cable. If you need to order a longer length, you can do that here: eMotimo Motor Extension Cables
Plug your turntable extension into the M4 port on your ST4.3.
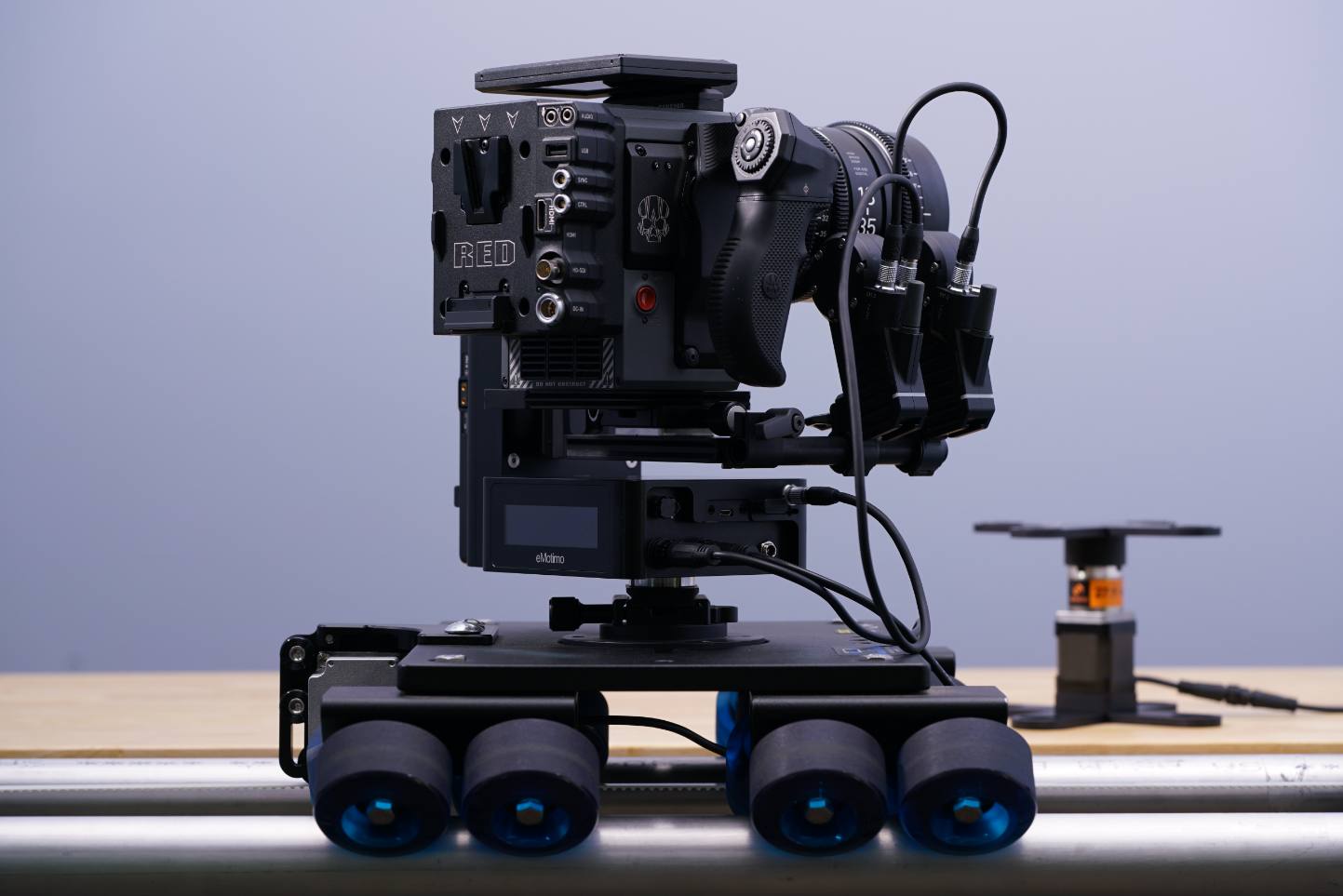
Mount your camera onto the eMotimo Heavy Duty L Bracket.
This can be done with the standard undercut hardware or by utilizing our Forward Backward Adjustment Plate Kit. Balance is very important with larger lenses. Open up our guide in a new tab here to read more about mounting/balancing.
With your camera mounted and balanced, we are going to rig up our Tilta Nucleus M motors for focus.
Start by attaching your Fz rail to your heavy-duty L bracket. Next, slide your first Tilta motor onto the rail and clamp down gently.
Now you can slider the second Tilta motor onto the rail and clamp that one down gently as well. We are now going to get our cables dialed in. Start with the 55cm 7-pin cable. One end will go into the ST4.3 EXT port and the other end will go directly into the FIRST Tilta motor (EXT 1). Your rig should look like this:

Next, you will insert a second (18cm or 55cm) cable into the "EXT 2" port of the first motor into the "EXT 1" or "EXT 2" port on the second motor. Your rig should now look like this:
If you're working in a studio environment, we always recommend the use of our 24v power supply. You will get the most out of your rig this way. If you don't own a 24v Power Supply, you can order it here.
Setting on the ST4.3
Power up your ST4.3 and connect the PS4 remote
Using the remote, jog down to Settings
Using the up/down on the DPAD go down until you see the "EXT port settings". Select "Tilta Nuc M" then exit and return to the main menu.
Power down, then power back up your ST4.3 (power cycle)
Setting on the Tilta Motor
Typically, your Tilta motors will power up with the ST4.3, but if not, power up your Tilta Motors by pressing power button on either of the two Tilta motors.
Set the Tilta Motor engaged with your lens's Focus as Motor 1.
Set the Tilta Motor engaged with your lens's Zoom as Motor 3.
Calibrate your lens motors automatically or manually for your lens using Tilta's support and documentation.
Test for functionality
Test 1 - Motor Control from the ST4.3 using Goto frames. For this test, make sure your Tilta Hand Controller is off or in Slave mode.
- From the main menu, Select Live Motion
- Use right DPad, until you see the Circle GoTo Frame.
- Jog both Focus and Zoom motors using the PS4 controller (see how to control the motors from the PS4 here) Note that the first time you jog the motors after power on, the motors need to synchronize where they are with where the ST4.3 think the motors are. The motor will move rapidly to the commanded position from the ST4.3. Subsequent moves will be smooth.
- Using X on the Controller, set the target position.
- Adjust The timing values as you would like - 5 seconds duration and 1 second ramp is typically good.
- Move the Focus and the Zoom motors from that set position to a new position
- Hit the Circle button to run a coordinated move to the target position. If both motors move, you are set!
Test 2 - Motor Telemetry and Hand Controller data reaching ST4.3
In normal operation, the telemetry or position data from the motors is streamed to the ST4.3. For this test, make sure your Tilta Hand Controller is on and in Master (sending wireless data to motors)
- From the main menu, select Settings
- Use DPad down, until you see Telemetry - Select using X
- Use DPad Down one - you see the Tilta Nuc. M telemetry screen
- Using the hand controller to move Focus and Zoom - values for sent and received should change on the screen and motors should move with little or no delay.
Once you have rigged and tested your 6-axis configuration, you are ready to set up and run some simple moves.
Comments
0 comments
Please sign in to leave a comment.